Steering #
The Steering section configures the properties of the steerable wheels, typically the front wheels.
Steering modes #
The wheels that are steerable are defined in the Axles section:
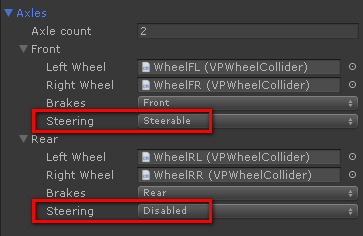
Each steering axle can be configured as follows in the Axles section:
- Disabled
- No steering.
- Steerable
- Regular steering as configured in the Steering settings. This is the standard steering mode.
- Ratio
- This axle steers the given fraction of the demanded steering. Useful for additional steering axles with smaller steering angle. Negative ratios are allowed (i.e. for rearmost axle in buses).
- Reference
-
The steering ratio is defined by the longitudinal position of the axle relative to the Ratio Reference transform configured in the Steering settings.
Useful for multi-axle vehicles with several steering axles. Instead of specifying a ratio value, in this mode the ratio is defined by the distance of the axle to the Ratio Reference transform.
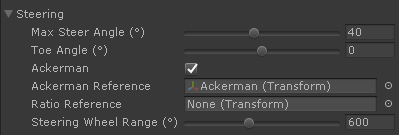
Steering Settings #
- Max Steer Angle
- Maximum steer angle in degrees in plain conditions (no Ackerman, no ratio, etc).
- Toe Angle
-
Toe angle in degrees. Positive value is convergence (Toe-in), negative value is divergence (Toe-out).
Reference: Toe Angle Basics
Reference: How Toe Angle Affects Ackerman Angles - Ackerman
-
Enables Ackerman geometry for the steering wheels. Requires Ackerman Reference.
- Ackerman Reference
-
A local Transform in the car used as reference for calculating the Ackerman angles. The Ackerman effect depends of the position of this Transform:
- True Ackerman: middle of the rear axle. Use this by default.
- More Ackerman: ahead of the rear axle.
- Less Ackerman: behind the rear axle.
- Ratio Reference
- A local Transform in the car used for calculating the steering ratio in multi-steering axles configured as Reference in the Axles section. Typically, the position of this transform is the middle of the axle that does not steers.
- Steering Wheel Range
- Steering range in degrees of the vehicle's steering wheel, from end to end. This value is used for rotating the graphical steering wheel object (see VPVisualEffects), as well as configuring the physical steering wheel device when used.
Scripting Reference #
Steering.Settings #
namespace VehiclePhysics
{
public class Steering
{
[Serializable]
public class Settings
{
[Range(0,90)]
public float maxSteerAngle = 35.0f;
// Positive toe = toe in (front of the wheels pointing towards the centreline of the vehicle)
// Begative toe = toe out (front of the wheels pointing away the centreline of the vehicle)
[Range(-15,+15)]
public float toeAngle = 0.0f;
// Should this steering controller apply ackerman geometry? (requires ackermanReference)
public bool ackerman;
// Reference for the ackerman geometry. This transform will be typically located
// at the rear axle. Ackerman effect can be increased setting the position forward of the
// rear axle ("more ackerman") or decreased by setting it behind ("less ackerman").
//
// Note: We need the local position relative to the rigidbody.
// In practice we take localPosition and show a warning in the PropertyDrawer if
// the object has any scale applied or if there's no rigidbody on its parent.
public Transform ackermanReference;
// Reference for calculating the steering ratio on multiple steering axles. Wheels must be
// added with the Reference steering mode.
//
// The axle farthest to the reference receives steering ratio +1 (or -1 if it's located
// behind the reference). Wheels in between receive proportional ratios.
public Transform ratioReference;
// Degrees of rotation in the vehicle's steering wheel. Used to:
// - Visually rotate the steering wheel mesh
// - Configure physical steering wheel devices
[Range(180, 1200)]
public float steeringWheelRange = 600.0f;
}
}
}